📚 本文是 「从 0 到 1 带你打电赛 · 小车电控篇」 系列(共 12 篇)第 1 篇。
先问你一个问题:你觉得电赛拿奖,最该练的是什么?是把代码写得多漂亮,还是把报告写得多厚?
如果你脑子里第一反应是”报告要写好、PPT 要做炫”,那这篇就是来”劝退”这个想法的。我们这群拿过奖、也翻过车的人复盘下来,结论很一致:电赛小车这条赛道,拿分逻辑跟你想的可能不太一样。 这一篇不讲任何代码、不调任何参数,只干一件事——把”拿奖”这个听起来很玄的目标,拆成一条你接下来能照着练的清单。
把地图先摊开,后面十一篇你才知道每一步是在往哪走。
先用一分钟说清楚:这比赛到底是个啥
全国大学生电子设计竞赛(简称电赛,英文缩写 NUEDC),由教育部和工信部共同发起,是国内电子信息类规模最大、含金量最高的学科竞赛,一年差不多四万人参赛。它有个让新人很懵的”大小年”规律:
📝 大年 vs 小年
- 奇数年=国赛(”大年”),全国统一命题,规模最大;
- 偶数年=省赛 + TI 杯模拟电子系统设计专题赛(”小年”),专题赛的初赛和双数年省赛合并进行。
所以你能不能赶上一次完整的国赛,跟你大几入学有点关系——这是组队前就该算清楚的事。
报名规则很简单:本校三个人自愿组一队,国赛名额通常要靠省赛推荐(一般是省一,部分省份可推优秀省二)。控制类(也就是我们这个”小车/平衡车/云台追踪”赛道)是电赛的核心方向之一。
最有”仪式感”的是赛程:四天三夜封闭。 一般 8 月初开赛,第一天早上 8 点前发题,最后一天晚上 8 点开始装箱封箱,中间禁止老师指导,元器件由学校提供。这四天三夜,你大概率是要熬夜的——所以”身体和心态扛不扛得住”,本身就是实力的一部分。
💡 一句话定位
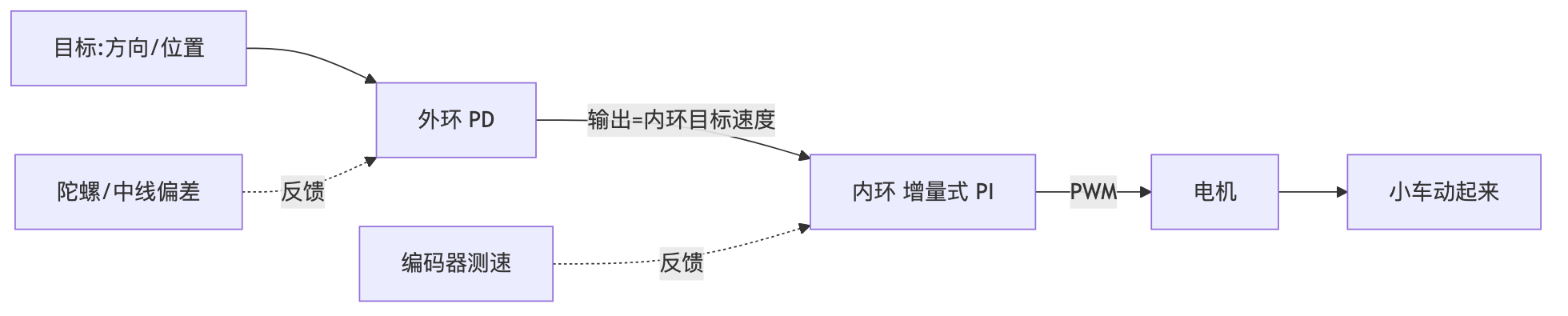
电赛小车赛道,技术栈和”全国大学生智能汽车竞赛”几乎完全重合:同样是 STM32/TI 单片机 + 编码器测速 + 电机 H 桥驱动 + 串级 PID + 各种传感器(红外阵列/电磁电感/摄像头/IMU)。这意味着:智能车队每年公开的技术报告,是你备赛时白捡的金矿。 那些报告把电磁归一化、差比和、模糊 PID、姿态解算、调参曲线写得极透,比电赛赛后零散经验系统得多。这点我们在《赛题进化史》和《现场作战手册》两篇会反复用到。
重头戏:这比赛的分,到底是怎么给的
这是全篇最值钱的一节,请慢点读。
很多人对评分有个”祖传印象”:总分 150,报告占 1/3(50 分)。 你在不少老资料、老学长口口相传里都会听到这个说法。
打住——这个数字不能拿来规划你的精力。
⚠️ 先纠正一个流传很广的过时印象
“总分 150、报告占 1/3” 是 2019 年前的老格式了。你真正要面对的是每道具体赛题自带的官方评分表——而近年真题(2021、2024)的评分表,统统是 120 分制,报告只占 20 分。 换句话说:按单题官方评分表,报告占 20/120 ≈ 1/6,远低于传说中的 1/3。别再按”报告占三分之一”去分配时间了。
我们直接看两份官方真题的评分表,硬碰硬:
| 赛题 | 报告 | 客观测试 | 总分 | 报告占比 |
|---|---|---|---|---|
| 2024 H 题·自动行驶小车 | 20 | 要求(1)20 + (2)20 + (3)30 + (4)30 = 100 | 120 | ≈ 17% |
| 2021 F 题·智能送药小车 | 20 | 基本要求 50(12/18/20)+ 发挥部分 50(23/21/其他6) | 120 | ≈ 17% |
两道题、隔了三年,结构却惊人一致:报告恒为 20 分,剩下 100 分全是能拿尺子量、能掐秒表算的客观测试。 客观测试占了约 83%。
这就推出第一条铁律:
❗ 拿分黄金顺序
先保测试通过 → 再拼测试成绩 → 最后才润色报告。 客观测试是排名的绝对主导。一份漂亮报告救不了一辆跑不动的车;但一辆能稳稳跑完的车,配上一份”按点填空”的及格报告,就足够你冲奖了。
打个比方:客观测试 vs 报告,就像高考的”笔试分”和”卷面整洁分”。 小车真能跑、跑得准、跑得快,那是 120 分里的 100 分;报告写得漂亮,只值 20 分。字再工整,题做错了也白搭——先把题做对,再把卷面写干净。
比”少拿分”可怕一万倍的事:失败即 0 分
如果说”报告占比”是认知误区,那下面这个才是真正会让你前功尽弃的东西——红线。
客观测试里埋了一大堆”踩了就该项归零、甚至整场归零”的硬规则。以 2024 H 题为例,官方”说明”里白纸黑字写着这些约束:
🔥 2024 H 题的硬红线(踩一条就废一项)
- 小车尺寸必须 ≤ 25(长)× 15(宽)× 15(高)cm,超标不予测试;
- 必须是轮式,不得用履带、不得用麦克纳姆轮;
- 只能前进,不得后退;
- 必须用 TI MSPM0 系列单片机,不得用别的 MCU,而且控制板要把芯片暴露出来便于查验;
- 不得安装摄像头;
- 小车在地面的投影脱离规定圆弧,该项 0 分;
- 完成时间超过规定一倍以上,该项 0 分。
2021 F 题同样狠:发挥部分超过 60 秒直接计 0;投影连续落在黑线上超过 30cm、或整车越过黑实线、或两车连续接触超过 5 秒,该测试项直接 0 分。
这些红线为什么比”少拿几分发挥部分”严重得多?因为它们是”一票否决”。
💡 用驾考和游戏来理解
失败保护,就像考科目二”压线即挂”、像答题卡”涂错位”。 哪怕你每道题都会做,只要答题卡涂错了位(冲出赛道 / 超时 / 用错芯片 / 尺寸超标),整道题直接 0 分。所以”别犯低级错误归零”这件事,比你多攻一道难题划算得多。 也像打游戏——先保命,再刷分。 血都没了,输出再高也没意义。
关于”测试不过会怎样”,网上有种很流行的强表述:”测试不通过 = 报告不参与评分 = 直接 0 分”。这里要给你一个更准确的版本,免得你被吓得方向跑偏:
📝 把话说准确
官方明文能确认的是:硬件不合规会被直接取消测试资格(该项不测试=0 分);最终按”赛区测评分 + 报告评审”综合排名。但”测试不过则报告一律不计分”作为一条绝对规则,官方实施细则并没有这么写——那是二手资料的经验化解读。 准确的说法是:客观测试是排名的绝对主导,且设有大量”失败即 0 分 / 取消资格”的红线。 方向不变——避免归零是第一要务,只是别把它绝对化成”报告白写”。
还有两个你迟早要面对的关卡
光赛区跑得好还不够,想进国奖,得知道后面这两关:
- 综合测评(满分 30 分): 这是冲国奖队伍的”复测确认”关,俗称”关小黑屋”。统一在 8 月 10 日 8:00–15:00 单独一天闭卷进行,不能上网、不能用手机和电脑,只能带纸质资料,由至少 3 名专家共同签字记录。只有超过专家组划定的最低分数线,作品才计入全国评审总分(这条线不公开)。说白了,就是把你三个人单独带进小房间限时做一道题,验证作品到底是不是你们自己做的、基本功扎不扎实。
- 获奖比例(你得知道自己在跟多少人抢): 全国奖总数 ≤ 参赛队的 8%(国一、国二大约三七开);赛区一二三等总获奖 ≤ 40%;赛区把 ≤ 10% 的优秀队材料上报全国。还有个细则:同一所学校、同一道题,推荐参加全国评奖的总队数 ≤ 4 个。
把这两关串起来看,结论很冷酷也很清晰:想进国奖,你得先在赛区前 10%,而且测试硬实力必须真的够。 报告里的数据还不能造假——综合测评和复评是可能要你现场复测的,数据对不上直接出局。
把”拿奖”拆成能训练的小目标
好,现在我们手里有了评分逻辑这把尺子。接下来反过来想:评委按什么给分,我就该按什么顺序练。 这条能力链,是这一篇最想塞给你的”心智模型”:

逐个拆开说:
① 稳——不冲出赛道、不挂零。 这是地基,对应红线里那一堆”0 分”项。能力上靠的是方向环 + 合理限速,先让车低速也能稳稳跟着线走、不丢线、不冲出。这一步练扎实,你就已经跑赢一大批”车一上赛道就飞出去”的队伍了。
🧩 "禁后退"逼出来的一个细节
H 题只能前进、不能后退。这意味着循迹一旦冲出去,你没法靠倒车找回来。所以丢线保护必须靠转向:全丢线时锁住上一次的偏差方向、把方向打死继续找线,同时把目标速度降到很低甚至点动。这点不做,禁后退题型就是直接出界 0 分。具体怎么写在《感知层》和《状态机与整车软件》两篇细讲。
② 准——定点停车,投影覆盖顶点。 光会跑还不够,题目往往要求停在指定位置(比如投影要盖住 A/B/C/D 顶点)。这靠的是距离环 + 到点判定逻辑,让车知道”我到了,该停了”。
③ 快——发挥部分拼用时。 H 题要求(4)明确写着”用时越少越好”,这就是发挥分。但提速会放大循迹和惯性误差,一不小心就冲出去(又回到红线 0 分)。所以这一步的原则是——
⚠️ 提速的纪律
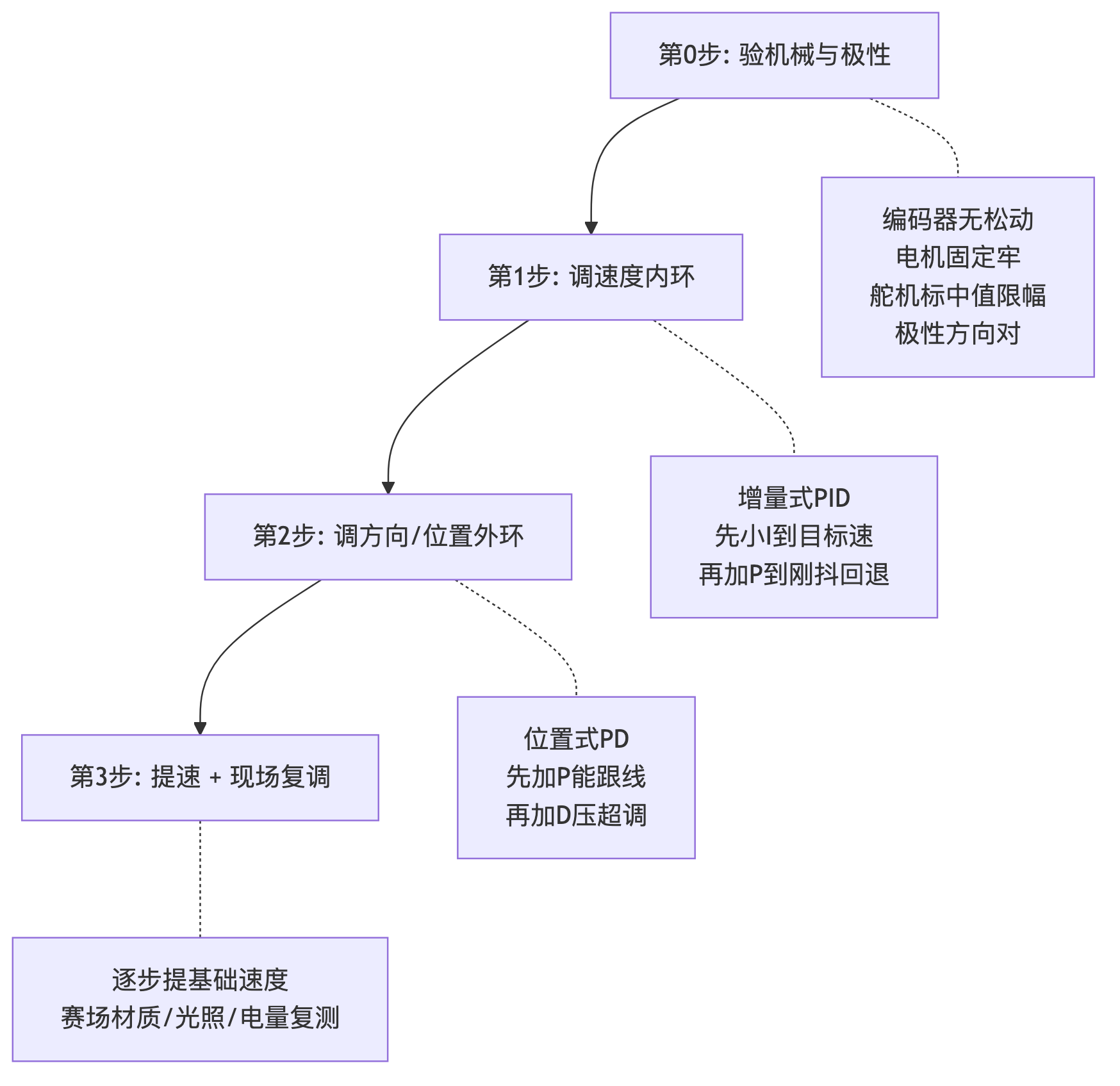
稳定复现,优先于峰值速度。 现场只测有限几次,挂零的代价极大。正确做法是分档提速:用一个”目标速度”全局变量,每加一档跑 3–5 次确认稳定再加;过弯时联动降速、直道再抢时间。另外,电池从满电到半电,同样的输出下车速会明显往下掉,标定时记得用接近现场的电量。具体调法见《PID 调参实战》一篇。
④ 报告闭环——误差分析 + 实测数据。 报告虽只占 20 分,但这 20 分是”按点给分的填空题”,性价比其实不低。以 H 题报告评分细分为例:
| 报告评分小项 | 分值 | 你该往里填什么 |
|---|---|---|
| 系统方案 | 3 | 系统框图(整车怎么搭、模块怎么连) |
| 理论分析与计算 | 5 | 误差来源分析(车为什么会偏) |
| 电路与程序设计 | 5 | 关键电路图 + 控制流程 |
| 测试方案与结果 | 4 | 实测数据表 + 结果分析 |
| 报告结构规范性 | 3 | 图表规范、摘要清晰 |
✅ 报告就是"实验报告"
评委要看的是一条“测了 → 有数据 → 会分析”的闭环证据链。光说”我设计了一辆循迹小车”没用;要有系统框图(怎么做)、误差来源分析(为什么会偏)、实测数据表 + 结果分析(到底跑得多准)。光”理论分析 5 分 + 测试结果 4 分”这 9 分,就是直接奖励你”会做实验”的。所以——报告随做随写、数据随测随存,别留到最后一晚硬赶。
一个绕不开的策略问题:基本要求 vs 发挥部分
赛题一般分”基本要求”和”发挥部分”两段。怎么取舍?
💡 主线任务 vs 支线任务
基本要求像游戏主线,发挥部分像支线。 主线必须通关才有资格评奖,稳拿;支线分高但难、容易翻车,等主线稳定通关后再去刷,刷不动就别强求——免得连主线进度都丢了。
以 H 题为例:要求(1)(2)各 20 分共 40 分,难度低、能 100% 稳过;要求(3)(4)各 30 分但难度高、风险大。理性的打法是:先把 40 分稳稳吃满,再去冲 (3);与其赌难度最高的 (4),不如先确保前面不掉链子。 立创 wiki 里有个很经典的案例:某队卡在”波形显示 +10 分”做不出来,被建议”波形做不出,就把 UI 设计的 +10 分拿满”——按分值优先级拿分,而不是死磕一个难点。
🔥 一个反直觉的坑
现场不能稳定复现的功能,宁可不做。 因为一个不稳定的发挥功能,可能正好在测试那一次把车送出赛道,触发 0 分红线,反而把名次拉低。这就是为什么”稳”永远排在能力链第一位。
来自前辈的几条血泪教训
光讲道理太干,给你几个真实翻车现场,提前感受一下”坑”长什么样(细节和处置我们留到对应篇章展开):
-
方案越复杂越烧时间。 有队伍上了”双摄像头”方案,整场都在优化图像处理,赛后才发现单摄像头改个朝向就能实现同样功能。更致命的是没做版本管理——第一版能跑的程序后来”复现不出来”,第三天又过度自信去研究高精度模型,最后回不到能用的版本。教训:先用最简方案跑通拿保底分;每个能跑的版本立刻打包备份,”能复现”比”更优”重要得多。(来源)
-
硬件 / 机械问题,软件救不了。 同一台车在瓷砖地能跑 2m/s,换到木地板却加速不上去,根因是编码器机械摩擦 + 电机 PID 失配;还有激光因虚焊间歇失效,最后靠焊死才解决。教训:关键信号线要焊接、别用杜邦线;机械和电源前两天就定型,后期只动参数。
-
车模和电机要冗余前置。 有人现场才发现车模尺寸超标、或电机扭矩不够,已经来不及了。教训:多备车模 / 电机 / 轮子 / 驱动 / 传感器;开赛先按题目尺寸和约束选定平台,别等软件调好才发现硬件违规。
💡 时间是四天三夜里最贵的资源
一个问题卡了超过十分钟还没思路,就换条路或者问队友、翻资料,别在一个点上盲目硬试几小时。这种”止损纪律”,往往比你多会一个算法更能决定成败。
本系列的学习地图
这一篇是”为什么”,接下来的十一篇是”怎么做”。给你一张全图,知道每篇在能力链的哪个位置:
| 篇 | 主题 | 解决能力链的哪一环 |
|---|---|---|
| 二 | 赛题进化史与押题 | 看懂出题套路 |
| 三 | 整车搭建与代码框架 | 0 阶段·分工与解耦 |
| 四 | 电机驱动与电源地基 | 稳·硬件地基 |
| 五 | 感知:灰度/电磁/编码器/IMU | 稳 + 准·反馈信号 |
| 六 | PID 入门(搞懂 P/I/D) | 稳·控制入门 |
| 七 | PID 进阶(串级 + 工程补丁) | 稳·不翻车 |
| 八 | PID 调参实战(核心) | 准 + 快·看波形治百病 |
| 九 | 进阶控制(几时该上) | 快·锦上添花 |
| 十 | K230 视觉与通信 | 准·更高级的眼睛 |
| 十一 | 状态机与整车软件 | 把一切串起来 |
| 十二 | 现场作战 + 避坑 + 开源 | 报告闭环 + 实战收官 |
✅ 如果只让你记住这一篇的三句话
- 客观测试约 83%、报告约 17%——别再按”报告占 1/3″分配精力;
- “失败即 0 分”的红线,比少拿几分发挥部分可怕得多——保命第一;
- 按 稳 → 准 → 快 → 报告闭环 这条链去练,每一步都对得上评分表。
把方向定好了,下一步自然是搞清楚”出题人到底想考什么”。下一篇《赛题进化史与押题》,我们就顺着历年小车赛题的演变,带你看懂出题套路、押对备赛方向。
📚 本文是 「从 0 到 1 带你打电赛 · 小车电控篇」 系列(共 12 篇)第 1 篇。